振動部品供給システムサプライヤー
振動ボウルフィーダー、フレキシブルフィーダー、遠心フィーダーは、産業オートメーションにおける「フィーダー」であり、指定された場所に部品を迅速かつ正確に供給できます。これらの「フレックスフィーダー」は通常、CCD カメラや「機械アーム」ロボットと連携して、自動化された生産ラインをよりインテリジェントにします。
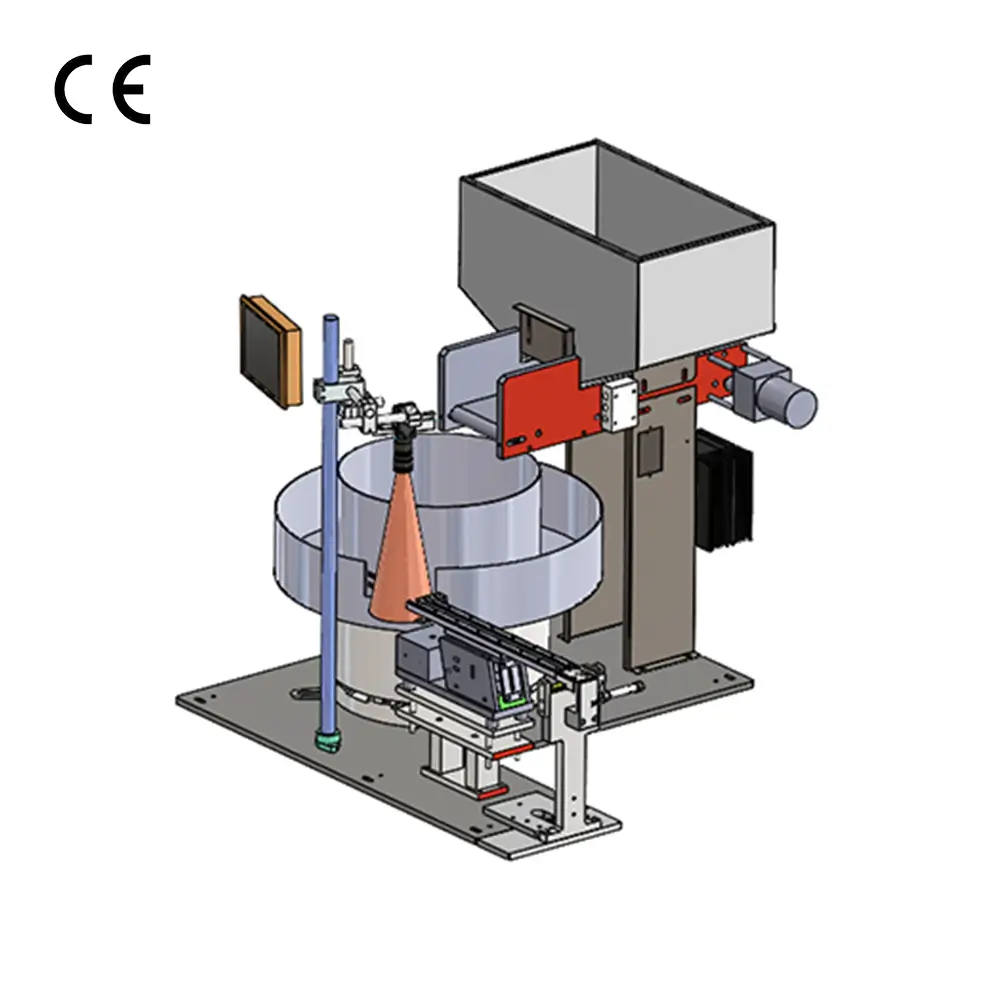
- 品質管理への応用(CCD統合):
- 当社では、品質管理のために、振動ボウル フィーダーとフレックス フィーダー システムを CCD カメラと統合しています。部品が移動すると、CCD カメラが画像をキャプチャして、欠陥や向きをチェックします。
- 当社のコンピューター ビジョン アルゴリズムは、これらの画像を分析して欠陥を検出し、部品の向きを検証します。欠陥のある部品を自動的に選別または拒否し、高品質のコンポーネントのみが製造を継続されるようにします。
- ロボット組立における応用:
- 当社では、振動ボウルフィーダー、フレックスフィーダー、遠心フィーダーをロボットと組み合わせて、自動組み立て作業を行うことがよくあります。
- グリッパーまたはエンドエフェクタを備えたロボットは、部品の向きと位置に基づいてフィーダ システムから部品を拾うことができます。フィーダ システムにより、ロボットへの部品の一貫した供給が保証され、人間の介入なしに連続動作が可能になります。
- フィーダー システムとロボットを統合すると、組み立てプロセスが合理化され、効率が向上し、サイクル タイムが短縮されます。また、さまざまな種類の部品やコンポーネントをより柔軟に処理できるようになります。
- ピックアンドプレース操作におけるアプリケーション:
- 正確な部品の位置決めが重要なピックアンドプレース操作では、振動ボウルフィーダーと遠心フィーダーがよく使用されます。
- 当社では、CCD カメラをフィーダー システムに統合し、ロボットに部品の位置と方向に関するフィードバックを提供します。これにより、ロボットは組み立て工程で部品を正確に拾い上げ、特定の場所に配置できるようになります。
- フィーダー システム、CCD カメラ、ロボットの組み合わせにより、ピックアンドプレース操作が高速かつ正確に実行され、製造プロセス全体の生産性と一貫性が向上します。
- 包装および仕分けにおける応用:
- また、効率的な整理とグループ化のために、フィーダー システムをパッケージングおよび仕分けアプリケーションに統合します。
- CCD カメラは、梱包または仕分けの前に、部品の向きや特定の特徴が適切かどうかを検査します。その後、ロボットが検査結果を使用して、部品を適切な梱包容器または仕分け容器に配置します。
- フィーダー システムを CCD カメラおよびロボットと統合することで、梱包および仕分けプロセスが最適化され、エラーが最小限に抑えられ、スループットが向上します。
ロボットと CCD を組み合わせたフレキシブルフィーダー:
















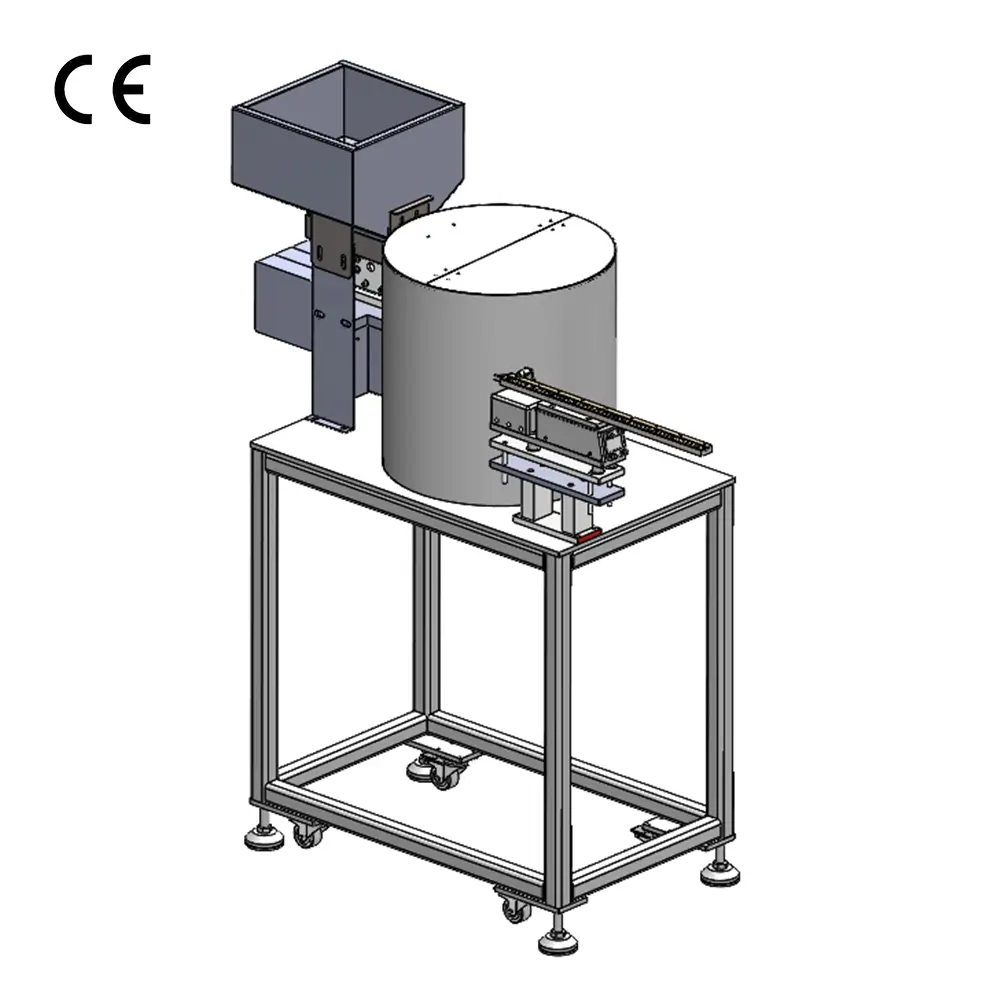
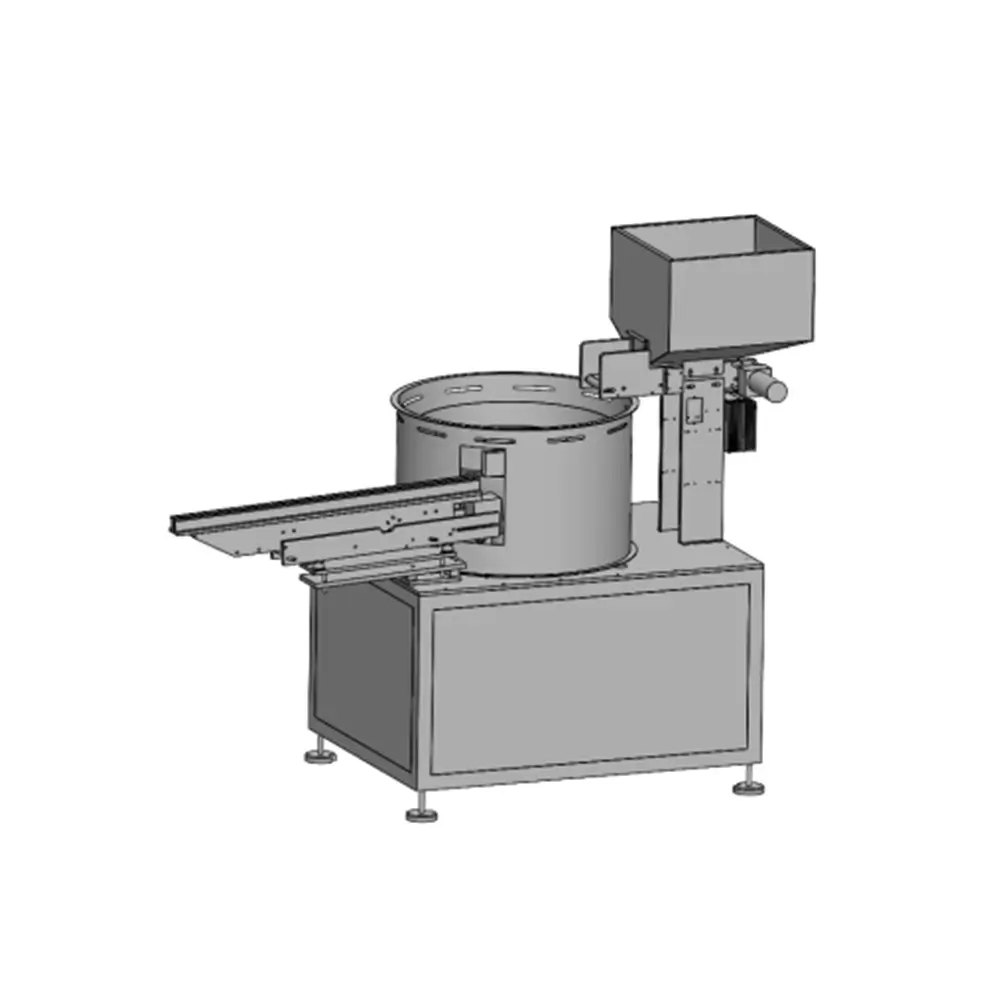
以下に振動ボウルフィーダーのモデルをいくつか示します。