
I. Components of a Parallel Robot A parallel robot (also known as a delta robot or spider robot) consists of the following main components: Component Category Specific Parts Mechanical structure Base frame (static platform), moving platform (end-effector platform), drive arms (active arms), forearm links (passive arms), spherical joints / ball joints, universal joints Drive & actuation Servo motors (one per arm), servo drives / amplifiers, precision reducers / gearboxes (low-backlash, e.g., harmonic or planetary) End-effector / tooling Tool mounting flange, suction cups / vacuum grippers, pneumatic or electric grippers, vacuum generator (venturi), custom fingers / jaws Control & sensing Motion controller (runs inverse kinematics), teach pendant / programming interface, encoders […]
タグアーカイブ: delta robot design
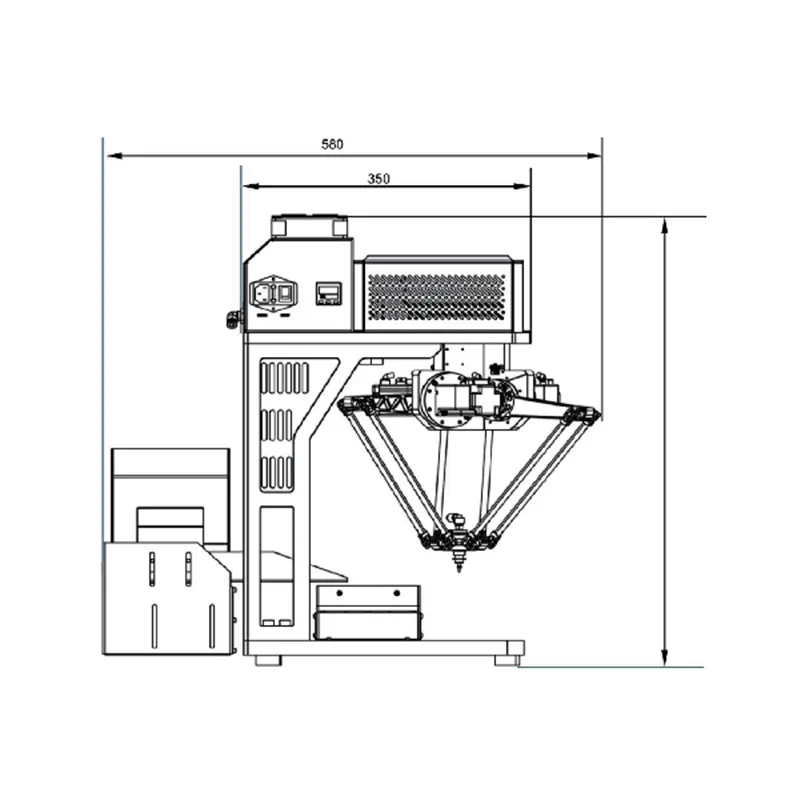
A delta robot is widely used in automation lines. It offers high speed and stable performance. In this guide, you will learn how to design a delta robot system. We will also explain the key components using a real setup. What Is a Delta Robot A delta robot uses a parallel arm structure. Three arms connect the base and the end tool. Because of this design, the robot moves fast and smoothly. It is often used in the food, packaging, and electronics industries. Main Components of a Delta Robot System A complete system includes more than the robot. It also needs feeding and control units. Hopper First, the hopper stores […]