
I. Components of a Parallel Robot A parallel robot (also known as a delta robot or spider robot) consists of the following main components: Component Category Specific Parts Mechanical structure Base frame (static platform), moving platform (end-effector platform), drive arms (active arms), forearm links (passive arms), spherical joints / ball joints, universal joints Drive & […]
תג ארכיון: delta robot design
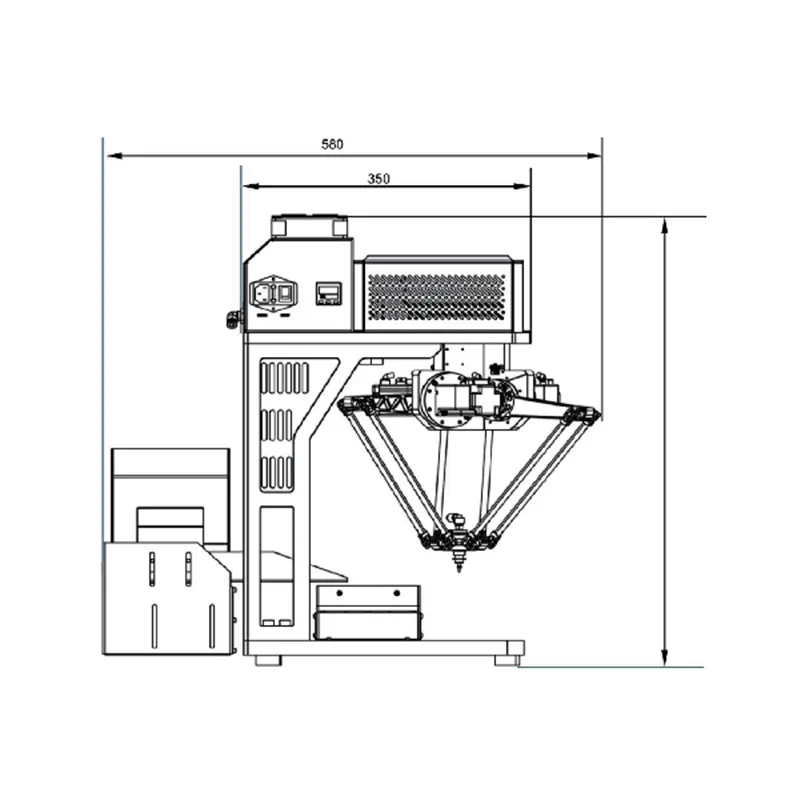
A delta robot is widely used in automation lines. It offers high speed and stable performance. In this guide, you will learn how to design a delta robot system. We will also explain the key components using a real setup. What Is a Delta Robot A delta robot uses a parallel arm structure. Three arms […]