
Parallel robots (also known as delta robots or spider robots) differ from conventional serial robots (such as articulated 6‑axis or SCARA robots) in several fundamental ways. The table below summarizes the key differences. I. Structural Differences Feature Parallel Robot Conventional Serial Robot Basic structure Multiple closed‑loop kinematic chains; all actuators work simultaneously to move a single platform Open kinematic chain; actuators work in sequence from base to end‑effector Arm arrangement Several arms (typically 3 or 4) connect the base platform directly to the moving platform One main arm with links connected end‑to‑end (like a human arm) Motor position All motors are fixed on the base frame Motors are distributed along […]
カテゴリーアーカイブ: Delta Robots
Are you facing challenges with slow or inaccurate production processes? Swoer delta robots are the solution. Our high-speed, precise robots excel at pick and place tasks, helping you increase efficiency and reduce errors. Read on to find out how Swoer’s delta robots can solve your automation challenges and streamline your operations.

I. Components of a Parallel Robot A parallel robot (also known as a delta robot or spider robot) consists of the following main components: Component Category Specific Parts Mechanical structure Base frame (static platform), moving platform (end-effector platform), drive arms (active arms), forearm links (passive arms), spherical joints / ball joints, universal joints Drive & actuation Servo motors (one per arm), servo drives / amplifiers, precision reducers / gearboxes (low-backlash, e.g., harmonic or planetary) End-effector / tooling Tool mounting flange, suction cups / vacuum grippers, pneumatic or electric grippers, vacuum generator (venturi), custom fingers / jaws Control & sensing Motion controller (runs inverse kinematics), teach pendant / programming interface, encoders […]

A parallel robot (delta robot) is very well suited for handling multiple products, provided the products fall within its payload, size, and speed capabilities. Its flexibility comes from the following features: I. Why Parallel Robots Are Good for Multi-Product Handling Feature Benefit for Multiple Products Vision guidance Can recognize different part shapes, colors, or positions without mechanical changeover. Programmable motion Pick-and-place positions, trajectories, and speeds can be changed via software. Tool changers / interchangeable grippers Allows the robot to handle different part geometries or pick methods (suction, gripping, magnetic). Quick changeover recipes Most modern delta robots store multiple product recipes; changeover is a few button presses or a barcode scan. […]

Parallel robots (also known as delta robots or spider robots) can be integrated with a wide variety of machines and equipment to form automated production systems. Below are the main categories of machines they commonly work with: I. Feeding and Parts Presentation Machines Machine Function Vibratory Bowl Feeder Orients and supplies small parts to the robot for picking Centrifugal Feeder Provides continuous, high-speed part supply Linear Feeder Delivers parts in a straight line to a fixed pick position Tray / Magazine Loader Presents parts in organized trays for batch picking Conveyor Belt Brings parts to the robot; often with encoder tracking Elevator / Hopper Supplies bulk parts to the feeding […]
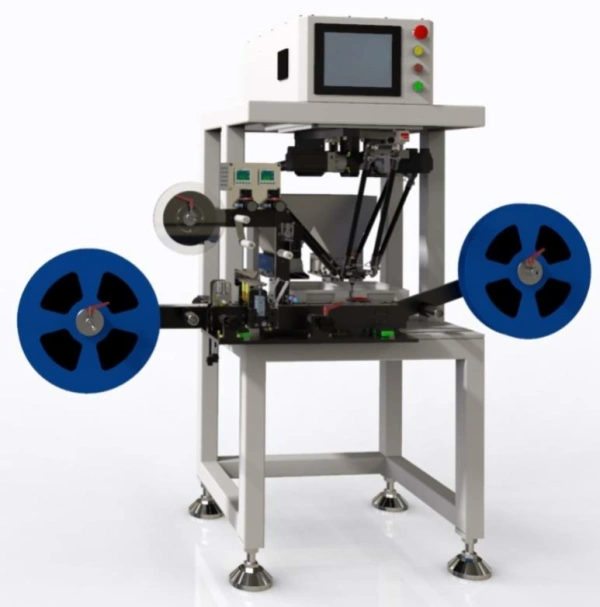
A taping machine (also known as a carrier tape sealing machine or SMT tape packaging machine) is used to package electronic components (such as chips, resistors, capacitors, LEDs, and connectors) into carrier tape for automated surface mount assembly. Its working principle can be summarized in the following steps: I. Working Principle Overview The machine inserts components into pockets of a carrier tape, then seals a cover tape over the pockets to protect the components during storage, transport, and automated pick-and-place assembly. II. Detailed Working Steps 1. Carrier Tape Feeding Process: A continuous carrier tape is unwound from a supply reel. Function: The tape has pre-formed pockets at regular intervals to hold individual components. […]

Advantages of Parallel Robots Parallel robots (also known as delta robots or spider robots) offer several distinct advantages over traditional serial robots (such as articulated or SCARA robots). These advantages make them the preferred choice for specific high-speed, high-precision applications. I. Speed and Dynamic Performance Extremely High Speed and Acceleration Description: Parallel robots achieve very high speeds (often >10 m/s) and accelerations (up to 10-15 G or more) due to their lightweight moving platform and fixed, heavy motors. Benefit: Ideal for high-throughput applications like pick-and-place, sorting, and packaging. Short Pick-and-Place Cycle Times Description: Typical cycle times for a 300mm pick-and-place operation range from 0.3 to 0.5 seconds. Benefit: Significantly faster […]
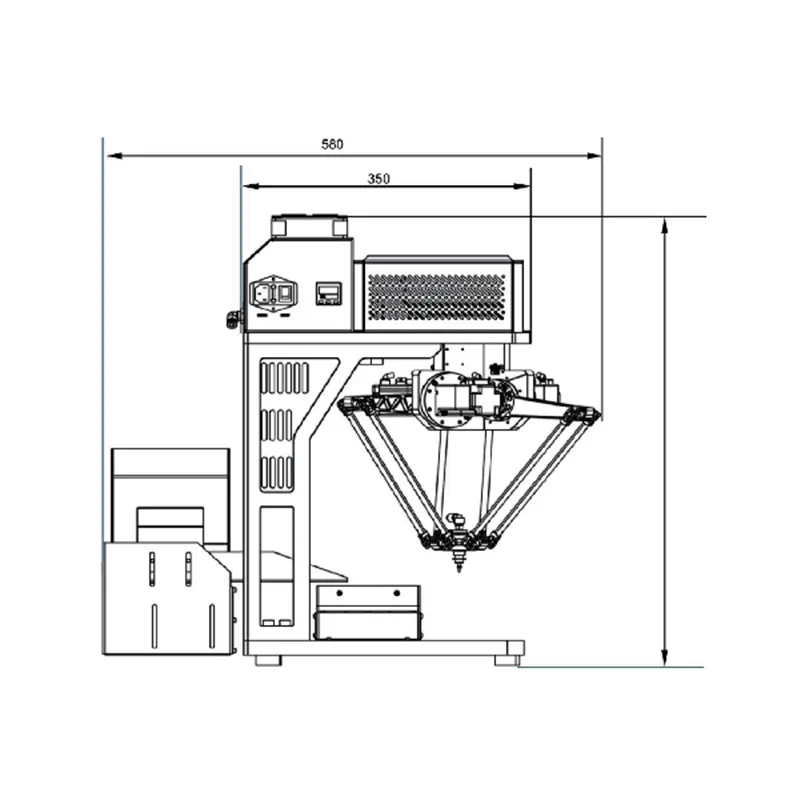
A delta robot is widely used in automation lines. It offers high speed and stable performance. In this guide, you will learn how to design a delta robot system. We will also explain the key components using a real setup. What Is a Delta Robot A delta robot uses a parallel arm structure. Three arms connect the base and the end tool. Because of this design, the robot moves fast and smoothly. It is often used in the food, packaging, and electronics industries. Main Components of a Delta Robot System A complete system includes more than the robot. It also needs feeding and control units. Hopper First, the hopper stores […]

Delta robots, known for their precision and speed, have revolutionized industries ranging from packaging to electronics. But have you ever wondered where these remarkable machines were created? Understanding the origin of the delta robot can help you appreciate the innovation behind it, as well as its journey into modern industrial applications. Where Was the Delta Robot First Developed? The delta robot was first developed in the early 1980s by Belgian engineer Reymond Clavel. His goal was to create a faster and more efficient robotic arm that could improve productivity in manufacturing environments. This innovation quickly gained attention for its speed and versatility. Who Were the Early Pioneers Behind the Delta […]

- 1
- 2