


While vibrating screens are essential equipment for particle size separation, they face several challenges in practical applications. The main pain points are as follows: I. Technical & Performance Pain Points Screen Mesh Blinding / Clogging Description: Fine particles become lodged in the screen openings, reducing open area and screening efficiency. Impact: Decreased throughput, frequent cleaning downtime, inconsistent product quality. Screen Mesh Wear and Breakage Description: Continuous abrasive action from materials causes screen media to wear out or tear, especially with hard or sharp particles. Impact: Frequent screen replacement costs, unplanned downtime, risk of oversize particles passing through. Inefficient Fine Particle Separation Description: Screening fine materials (e.g., below 100 mesh) becomes […]
A vibrating screen is a piece of screening equipment that uses vibration to separate materials by particle size. Its main functions are as follows: I. Particle Size Classification Function: Separates materials into different particle size ranges based on mesh aperture. Application: Classifies raw materials into multiple grades (e.g., coarse, medium, fine) for downstream processes. II. Scalping / Coarse Separation Function: Removes oversized materials (contaminants or oversize particles) from the feed stream. Application: Protects downstream equipment from damage or ensures feed material meets size specifications. III. De-dusting Function: Removes fine dust or powder from granular materials. Application: Improves product cleanliness and reduces dust emissions in processing lines. IV. De-watering Function: Removes […]
The term “machine base” can refer to different components depending on the equipment. Below are the advantages for two common applications: vibratory bowl feeder bases (drive units) and machine tool bases (support foundations). I. Advantages of a Vibratory Bowl Base (Drive Unit) The base of a vibratory bowl feeder is the core drive unit that generates vibration. Its key advantages include: 1. High-Efficiency Power Output Side-Pull Design: Utilizes a horizontal pulling action from the leaf springs, enhancing traction efficiency. This allows for greater driving force even with a smaller electromagnet. Dual-Spring Structure: Larger models feature dual leaf springs combined with reinforced vibration-damping rubber, significantly improving load response characteristics and adapting flexibly to varying […]
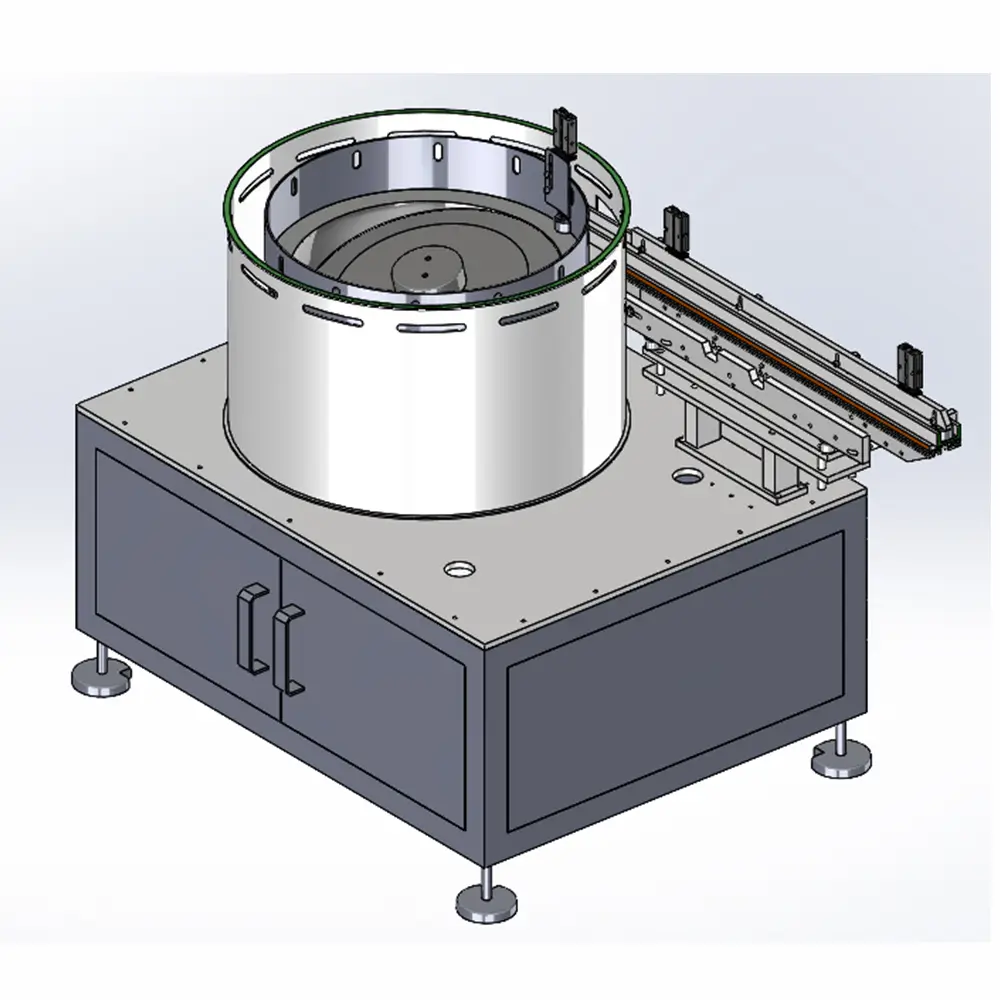
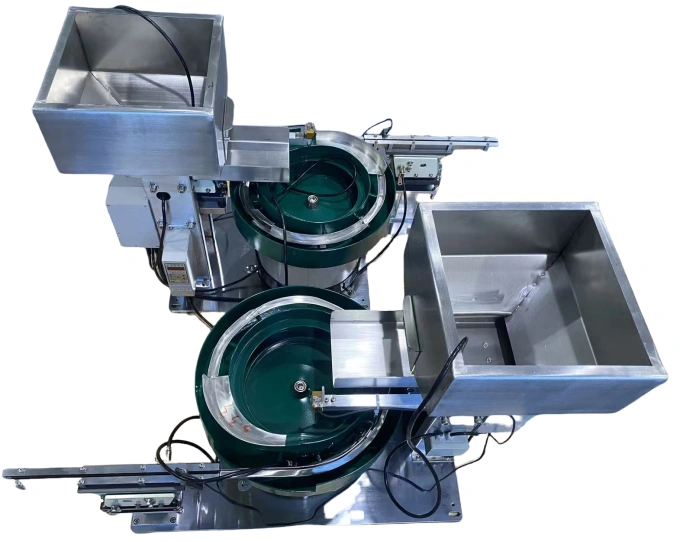
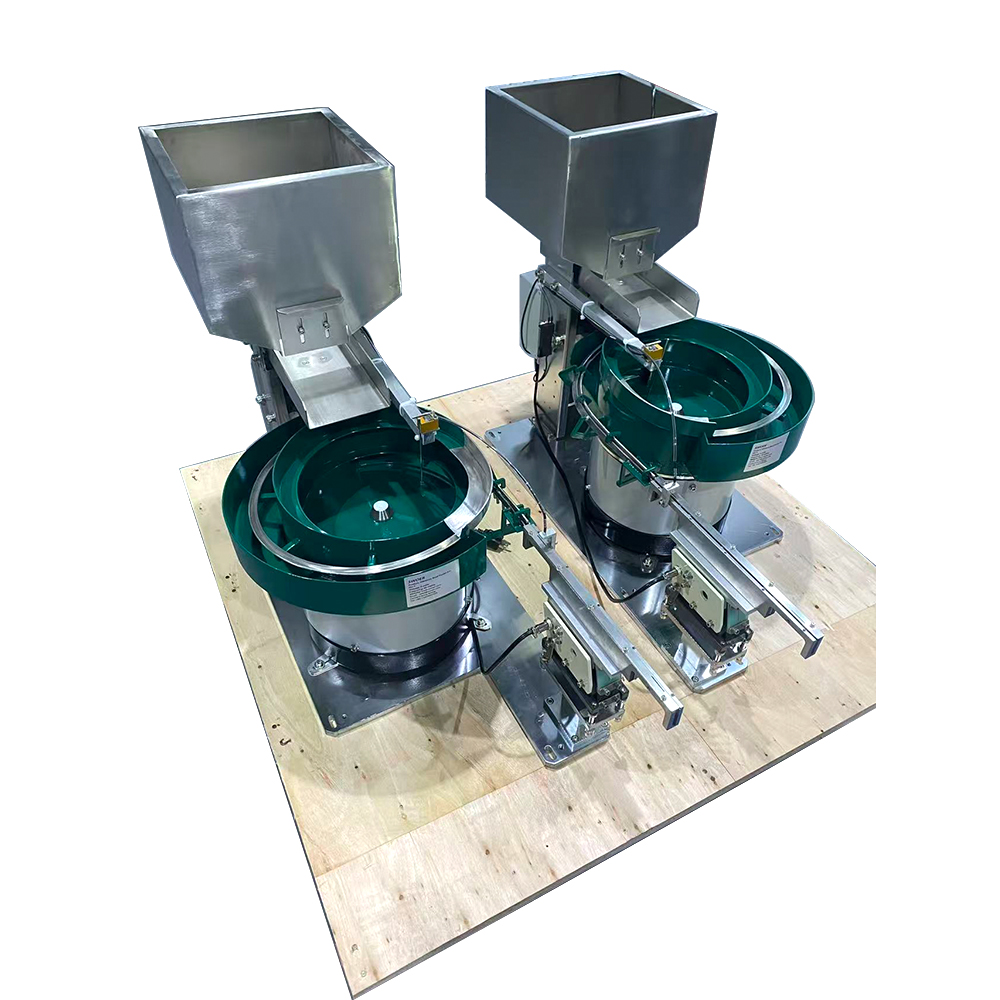
A vibratory bowl feeder is a versatile automation component that can be integrated with a wide range of machines to form complete automated production systems. Below are the primary categories of machines that commonly work with vibratory bowls: I. Assembly Machines Vibratory bowls are most frequently paired with various types of assembly equipment: Automatic Screwdriving Machines: Bowls feed screws to the screwdriver head. Press-Fit Machines: Feed pins, bearings, or bushings for pressing. Riveting Machines: Supply rivets to riveting heads. Insertion Machines: Feed electronic components, terminals, or connectors for insertion into PCBs or housings. Dispensing / Gluing Machines: Feed parts to be glued or dispensed upon. Capping / Sealing Machines: Supply […]

Small parts assembly needs precision and speed. Therefore, many factories use vibratory bowl feeders. These systems sort and orient components automatically. However, selecting the right feeder can be challenging. Many factors influence performance. This guide explains how to choose the right vibratory bowl feeder. In addition, it highlights how Swoer solutions support modern automation. Understand Your Part Characteristics First, analyze the parts you need to feed. Size, weight, and shape all matter. For example, metal screws behave differently from plastic caps. In addition, fragile parts require smoother handling. Consider these factors: Part dimensions Material type Surface condition Fragility As a result, understanding part characteristics prevents feeding problems. In many projects, […]
Main Uses of a Vibratory Bowl Feeder Part Orientation Many production lines need correctly positioned parts. For example, screws must face the same direction. Therefore, the feeder sorts and aligns them. Consequently, machines work faster and more accurately. Automated Feeding Factories must supply parts continuously. However, manual feeding slows production. Thus, vibratory feeders deliver parts automatically. As a result, workers can focus on other tasks. High-Speed Assembly Assembly lines often run at high speed. Therefore, parts must arrive quickly and consistently. Vibratory feeders maintain a steady flow. Consequently, production efficiency increases. Handling Small Components Many industries handle tiny components. For instance, electronics factories use micro parts. Similarly, medical device factories […]