





EV-DVI-100 フレックスフィーダーとロボット統合マシン
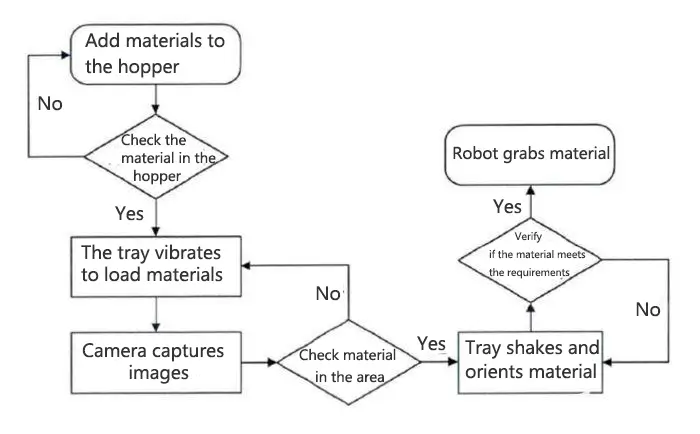
フレキシブルフィーダーの動作原理
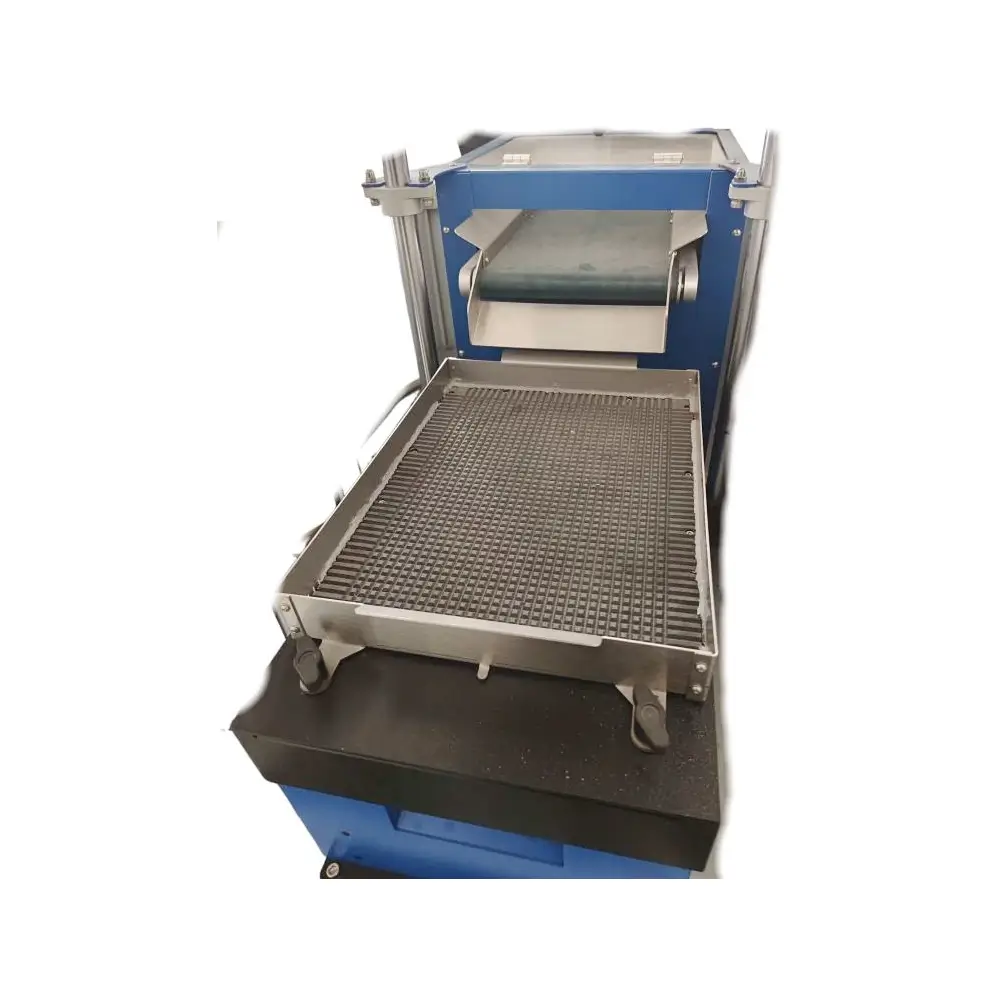
フレキシブルフィーダーはボイスコイルモーターを介して振動を発生させ、材料をプレート上で振動させます。この振動により、材料が活性化され(動きやすくなり)、特定の方向に移動できます。フレキシブルフィーダーは、コヒーレント波の共鳴と干渉の原理を使用して、材料を特定の方向に移動させ、配置を形成します。ボイスコイルモーターの振動周波数と振動方向を制御することにより、材料を方向性を持って輸送できます。自動分離と配置:振動プロセス中に、材料は重量、形状、サイズの違いに応じて自動的に分離および配置されます。この自動分離および配置機能は、材料の迅速かつ正確な分配を実現するのに役立ちます。
視覚認識・制御システム
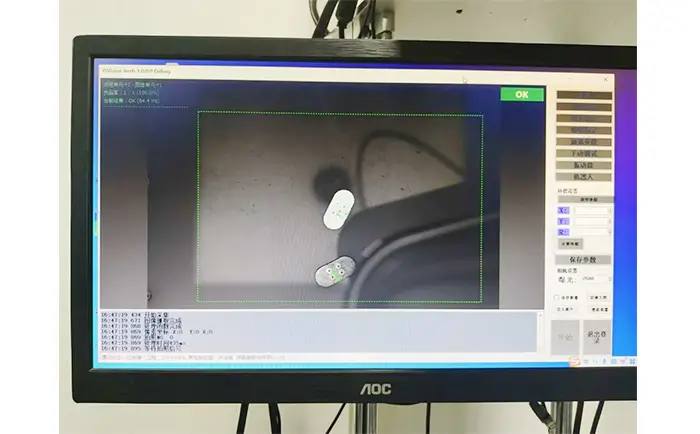
フレキシブルフィーダーには通常、小型部品の位置決めと識別のためのCCD視覚認識システムが装備されています。視覚システムは部品の位置情報を取得し、それを制御システムに伝送することができます。フレキシブルフィーダーの制御システムは、部品の位置情報に応じて、周波数や振幅などのボイスコイルモーターの振動パラメータを調整し、
正確な材料供給。同時に、制御システムはマニピュレータ(ロボット)の動きを制御して、部品を正確に掴むようにします。
視覚システムスクリーニング図
ロボットによる掴み
フレキシブルフィーダーはロボットと連携して、部品の位置情報に基づいてロボットの姿勢を調整し、自動化された無人供給操作を可能にします。ロボットが部品をつかむと、フレキシブル振動板は振動を停止し、つかみの安定性と精度を確保します。ロボットの吸引ノズルは、材料の特定の形状に応じて最適なものを選択できます。ロボットの吸引ノズルは、90cm〜100cmの高さで動作します。

ロボットの物理的な画像

ノズル実画像
ソリューションの利点
- 効率性の向上
柔軟なフィーダーにより、高速で正確な部品配置が保証され、生産ラインの自動化と効率が向上します。
- コスト削減
フレキシブルフィーダーは、シンプルな構造とメンテナンスの容易さにより、生産コストを削減し、経済的利益を高めます。
- 品質の向上
フレキシブル フィーダーは部品の位置決めを正確に制御し、手作業によるエラーを排除して製品の品質を向上させます。
アプリケーション業界
フレキシブル フィーダーは、次のようなシナリオでも広く使用されています。
- 電子機器製造: フレキシブルフィーダーは、供給、配置、組み立てを自動化することで生産効率を向上させます。
- 食品・医薬品業界: 食品や薬品の自動供給と仕分けにより、製品の衛生と品質を確保します。
- 医療機器業界: フレキシブル フィーダーは、外科用器具や歯科用機器などの小型部品の供給と配置を自動化します。
いくつかの業界の部品の図解
- 電子部品 (例:抵抗器、コンデンサ、IC、コネクタ)
- 自動車部品 (例:ボルト、ナット、クリップ、ワッシャー)
- プラスチック部品 (例:成形プラスチック部品)
- 金属部品 (例:ネジ、ピン、バネ)
- 医療機器部品 (例:注射器、バイアル、医療用コネクタ)
- 医薬品 (例:錠剤、カプセル、包装部品)

仕様
| アイテム | 標準 |
| モデル | EV-DVI-100 |
| 正確さ | ±0.1mm |
| 上高地 | ≥5000個/時 |
| フレックストレイサイズ | ディスク内寸 320 x 260mm、外寸 440 x 270mm |
| 配送頻度 | 1時間 |
| カメラ | Hikvision 20MPカメラ / 12MPカメラ |
| ロボット | 慧川/エプソン(アーム長さ400mm) |
| 点灯 | 400x 300 透過型バックライト |
| 制御システム | PC+ロボット |
| オペレーティング·システム | Win10、64ビットオペレーティングシステム |
| コンピューター | Intel® Core™ i5、Intel® Q370 チップセット、4G RAM、128G SSD + 1T HDD |
| 外形寸法 | 長さ1100 * 幅800 * 高さ1100mm |
| 重さ | 約1200KG |
| 力 | AC200V、50Hz |
| 気圧 | 0.5~0.7MPa |








レビュー
レビューはまだありません。