





Alimentador flexible EV-DVI-100 y máquina con robot integrado
Principio de funcionamiento del alimentador flexible
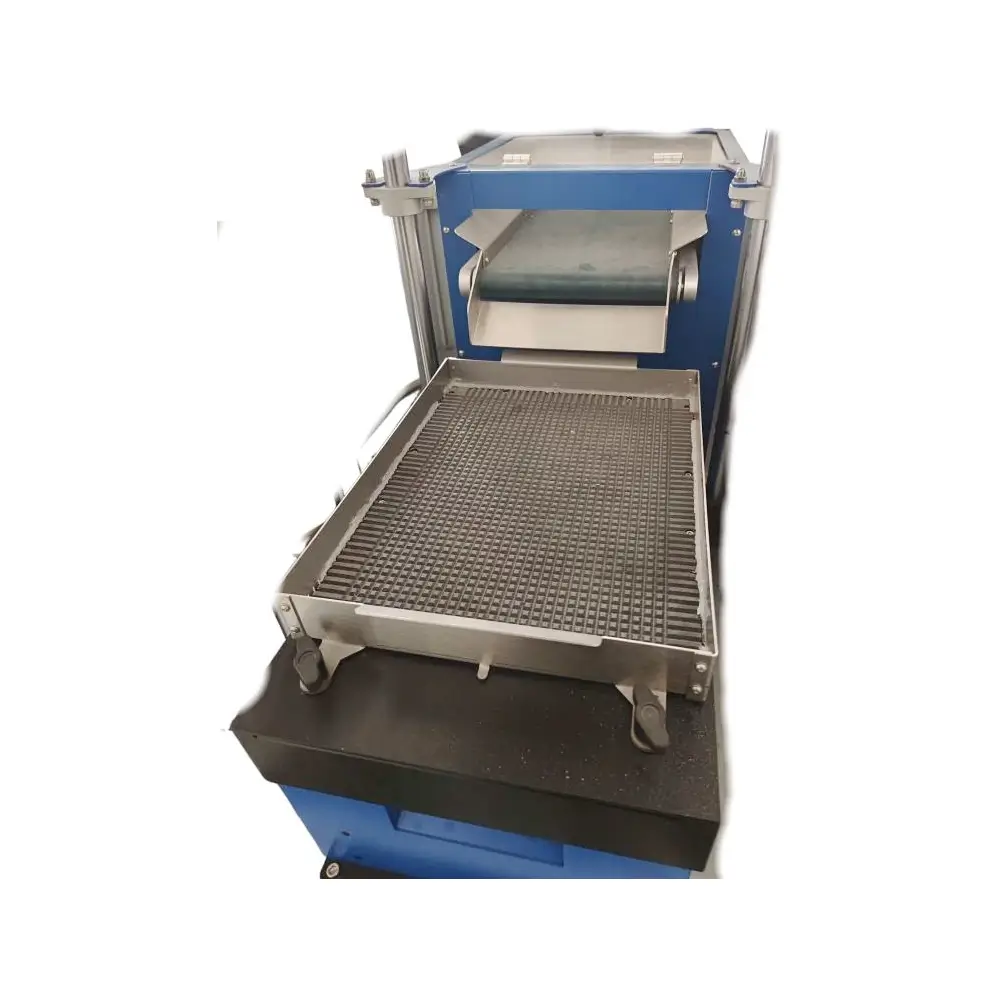
El alimentador flexible genera vibraciones a través del motor de bobina móvil, lo que hace que el material vibre en la placa. Esta vibración permite que el material se active (se mueva fácilmente) y se mueva en una dirección específica. El alimentador flexible utiliza el principio de resonancia e interferencia de ondas coherentes para mover el material en una dirección determinada y formar una disposición. Al controlar la frecuencia de vibración y la dirección de vibración del motor de bobina móvil, el material se puede transportar direccionalmente. Separación y disposición automáticas: Durante el proceso de vibración, los materiales se separarán y organizarán automáticamente de acuerdo con sus diferencias de peso, forma y tamaño. Esta función de separación y disposición automática ayuda a lograr una distribución rápida y precisa del material.
Sistema de reconocimiento y control visual
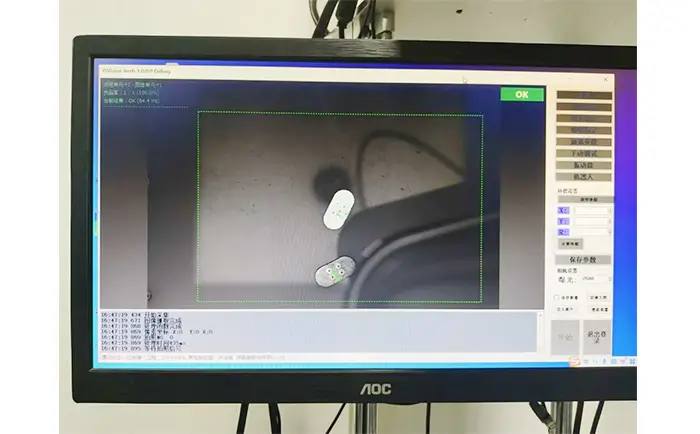
Los alimentadores flexibles suelen estar equipados con un sistema de reconocimiento visual CCD para posicionar e identificar piezas pequeñas. El sistema visual puede obtener la información de posición de las piezas y transmitirla al sistema de control. El sistema de control del alimentador flexible ajusta los parámetros de vibración del motor de bobina móvil, como la frecuencia y la amplitud, de acuerdo con la información de posición de la pieza para lograr
Entrega precisa del material. Al mismo tiempo, el sistema de control también puede controlar el movimiento del manipulador (robot) para garantizar que agarre las piezas con precisión.
Diagrama de detección del sistema visual
Agarre robótico
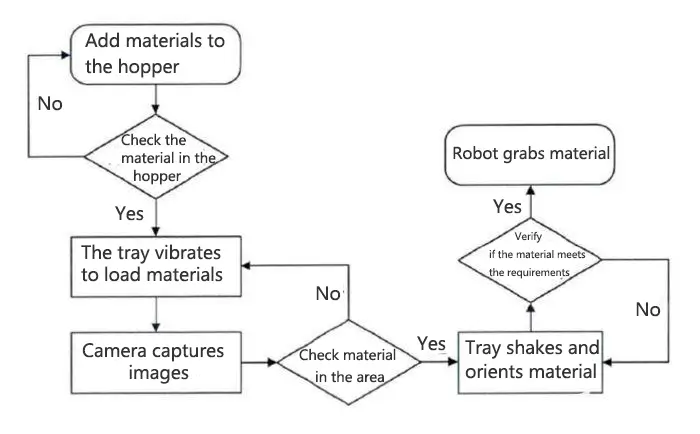
El alimentador flexible trabaja con el robot para ajustar su postura en función de la información sobre la posición de la pieza, lo que permite realizar operaciones de alimentación automatizadas y sin intervención humana. Cuando el robot agarra la pieza, la placa vibratoria flexible deja de vibrar para garantizar la estabilidad y la precisión de la sujeción. La boquilla de succión del robot puede seleccionar la más adecuada según la forma específica del material. La boquilla de succión del robot funciona a una altura de entre 90 y 100 cm.

Imagen física del robot

Imagen real de la boquilla
Ventajas de la solución
- Mejorar la eficiencia
El alimentador flexible garantiza una disposición rápida y precisa de las piezas, aumentando la automatización y la eficiencia de la línea de producción.
- Reducir costos
Con su estructura simple y facilidad de mantenimiento, el alimentador flexible reduce los costos de producción y mejora los beneficios económicos.
- Mejorar la calidad
El alimentador flexible controla con precisión el posicionamiento de la pieza, eliminando errores manuales y mejorando la calidad del producto.
Industria de aplicación
Los alimentadores flexibles también se utilizan ampliamente en los siguientes escenarios:
- Fabricación electrónica: Los alimentadores flexibles mejoran la eficiencia de la producción al automatizar la alimentación, la disposición y el ensamblaje.
- Industria alimentaria y farmacéutica: Garantizan la higiene y calidad del producto mediante la alimentación y clasificación automática de alimentos o medicamentos.
- Industria de dispositivos médicos: Los alimentadores flexibles automatizan la alimentación y disposición de piezas pequeñas, como instrumentos quirúrgicos y equipos dentales.
Ilustraciones de piezas en algunas industrias
- Componentes electrónicos (por ejemplo, resistencias, condensadores, circuitos integrados, conectores)
- Piezas de automoción (por ejemplo, pernos, tuercas, clips, arandelas)
- Piezas de plástico (por ejemplo, componentes de plástico moldeado)
- Piezas de metal (por ejemplo, tornillos, pasadores, resortes)
- Componentes de dispositivos médicos (por ejemplo, jeringas, viales, conectores médicos)
- Artículos farmacéuticos (por ejemplo, tabletas, cápsulas, piezas de embalaje)

Presupuesto
| Artículo | Estándar |
| Modelo | EV-DVI-100 |
| Exactitud | ±0,1 mm |
| Universidad Politécnica Federal | ≥5000 piezas/hora |
| Tamaño de la bandeja flexible | Dimensiones internas del disco: 320 x 260 mm. Dimensiones externas: 440 x 270 mm. |
| Frecuencia de entrega | 1 hora |
| Cámara | Cámara Hikvision de 20 MP / Cámara de 12 MP |
| Robot | Huichuan / Epson (longitud del brazo 400 mm) |
| Iluminación | Retroiluminación perforada de 400 x 300 |
| Sistema de control | Computadora personal + robot |
| Sistema operativo | Win10, sistema operativo de 64 bits |
| Computadora | Intel® Core™ i5, chipset Intel® Q370, 4 GB de RAM, SSD de 128 GB + HDD de 1 TB |
| Dimensiones del esquema | Largo 1100 * Ancho 800 * Alto 1100 mm |
| Peso | Alrededor de 1200 kg |
| Fuerza | CA 200 V, 50 Hz |
| Presión del aire | 0,5-0,7 MPa |







Valoraciones
No hay valoraciones aún.