





Machine intégrée au robot et au chargeur flexible EV-DVI-100
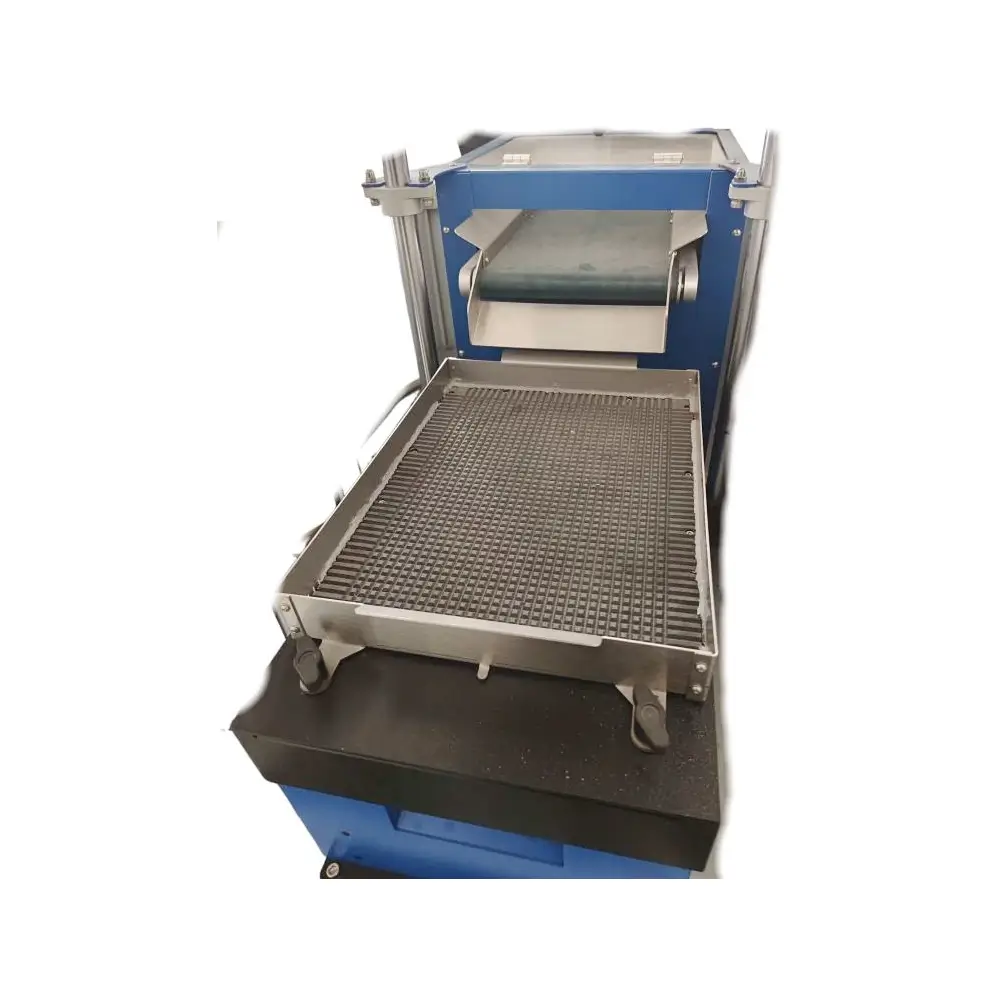
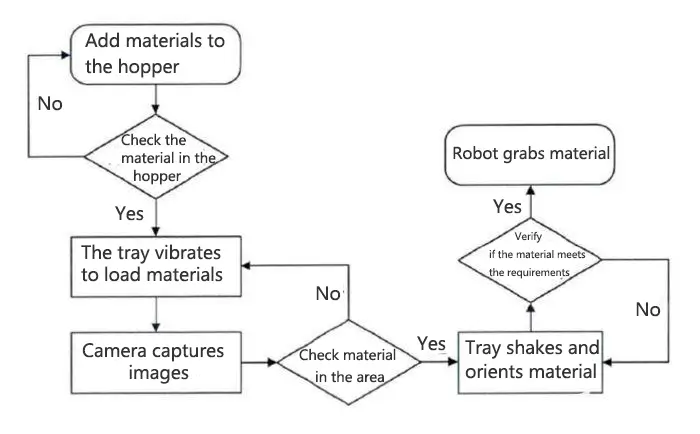
Principe de fonctionnement du chargeur flexible
Le chargeur flexible génère des vibrations via le moteur à bobine mobile, ce qui fait vibrer le matériau sur la plaque. Cette vibration permet au matériau d'être activé (facile à déplacer) et de se déplacer dans une direction spécifique. Le chargeur flexible utilise le principe de résonance et d'interférence d'ondes cohérentes pour déplacer le matériau dans une certaine direction et former un arrangement. En contrôlant la fréquence de vibration et la direction de vibration du moteur à bobine mobile, le matériau peut être transporté de manière directionnelle. Séparation et disposition automatiques : pendant le processus de vibration, les matériaux seront automatiquement séparés et disposés en fonction de leurs différences de poids, de forme et de taille. Cette fonction de séparation et d'agencement automatique permet d'obtenir une distribution rapide et précise des matériaux.
Système de reconnaissance et de contrôle visuel
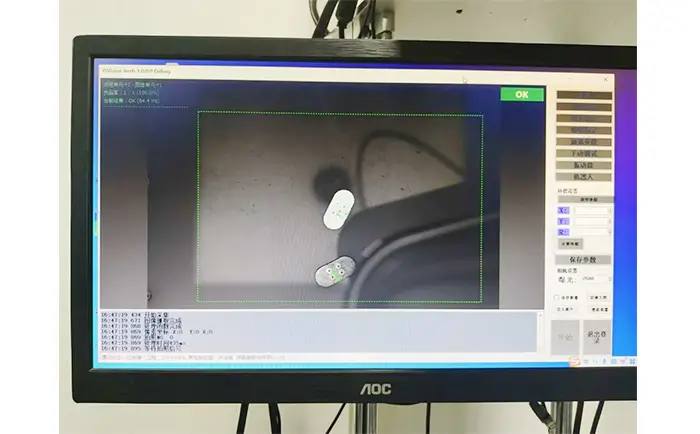
Les alimentateurs flexibles sont généralement équipés d'un système de reconnaissance visuelle CCD pour le positionnement et l'identification des petites pièces. Le système visuel peut obtenir les informations de position des pièces et les transmettre au système de contrôle. Le système de contrôle de l'alimentateur flexible ajuste les paramètres de vibration du moteur à bobine mobile, tels que la fréquence et l'amplitude, en fonction des informations de position de la pièce pour obtenir
Livraison précise des matériaux. Dans le même temps, le système de contrôle peut également contrôler le mouvement du manipulateur (robot) pour garantir qu'il saisit les pièces avec précision.
Diagramme de dépistage du système visuel
Préhension robotisée
Le dispositif d'alimentation flexible fonctionne avec le robot pour ajuster la posture du robot en fonction des informations sur la position de la pièce, ce qui permet des opérations d'alimentation automatisées et sans personnel. Lorsque le robot saisit la pièce, la plaque vibrante flexible cesse de vibrer pour assurer la stabilité et la précision de la saisie. La buse d'aspiration du robot peut sélectionner la buse la plus adaptée en fonction de la forme spécifique du matériau. La buse d'aspiration du robot fonctionne à une hauteur de 90 cm à 100 cm.

Image physique du robot

Image réelle de la buse
Avantages de la solution
- Améliorer l'efficacité
Le dispositif d'alimentation flexible assure une disposition rapide et précise des pièces, améliorant ainsi l'automatisation et l'efficacité de la ligne de production.
- Réduire les coûts
Grâce à sa structure simple et à sa facilité d’entretien, le chargeur flexible réduit les coûts de production et améliore les avantages économiques.
- Améliorer la qualité
Le chargeur flexible contrôle avec précision le positionnement des pièces, éliminant ainsi les erreurs manuelles et améliorant la qualité du produit.
Secteur d'application
Les alimentateurs flexibles sont également largement utilisés dans les scénarios suivants :
- Fabrication électronique : Les alimentateurs flexibles améliorent l'efficacité de la production en automatisant l'alimentation, l'agencement et l'assemblage.
- Industrie alimentaire et pharmaceutique : Ils assurent l’hygiène et la qualité des produits grâce à l’alimentation et au tri automatique des aliments ou des médicaments.
- Secteur des dispositifs médicaux : Les alimentateurs flexibles automatisent l'alimentation et la disposition de petites pièces, telles que les instruments chirurgicaux et l'équipement dentaire.
Illustrations de pièces dans certaines industries
- Composants électroniques (par exemple, résistances, condensateurs, circuits intégrés, connecteurs)
- Pièces détachées automobiles (par exemple, boulons, écrous, clips, rondelles)
- Pièces en plastique (par exemple, composants en plastique moulé)
- Pièces métalliques (par exemple, vis, broches, ressorts)
- Composants de dispositifs médicaux (par exemple, seringues, flacons, connecteurs médicaux)
- Articles pharmaceutiques (par exemple, comprimés, capsules, pièces d'emballage)

Caractéristiques
| Article | Standard |
| Modèle | EV-DVI-100 |
| Précision | ±0,1 mm |
| UPH | ≥ 5000 pièces/heure |
| Taille du plateau flexible | Dimensions intérieures du disque 320 x 260 mm, dimensions extérieures 440 x 270 mm |
| Fréquence de livraison | 1H |
| Caméra | Caméra Hikvision 20MP / Caméra 12MP |
| Robot | Huichuan / Epson (longueur du bras 400 mm) |
| Éclairage | Rétroéclairage perforé 400x 300 |
| Système de contrôle | PC+Robot |
| Système opérateur | Système d'exploitation Win10, 64 bits |
| Ordinateur | Processeur Intel® Core™ i5, chipset Intel® Q370, 4 Go de RAM, 128 Go de SSD + 1 To de disque dur |
| Dimensions du contour | L1100 * L800 * H1100mm |
| Poids | Environ 1200 kg |
| Pouvoir | CA 200 V, 50 Hz |
| Pression atmosphérique | 0,5-0,7 MPa |










Avis
Il n’y a pas encore d’avis.